Bloom
Kinetic Installation | Data Visualization | Digital Fabrication
Individual Work
Timeline: April 2021 - May 2021 (5 weeks)
Made with: Hardware - Arduino, Hoberman Sphere, Cardboard; Software - Node-RED, Tinkercad, Illustrator; Materials - Cardboard, Fishing Wire, Spray Paint.
| Opportunity
We were asked to develop a scenario of a unique environment that demonstrates responsiveness.
| Outcome
This project takes on macro-scale data, the birth rate in Chinese contemporary history, and amplifies it through art.
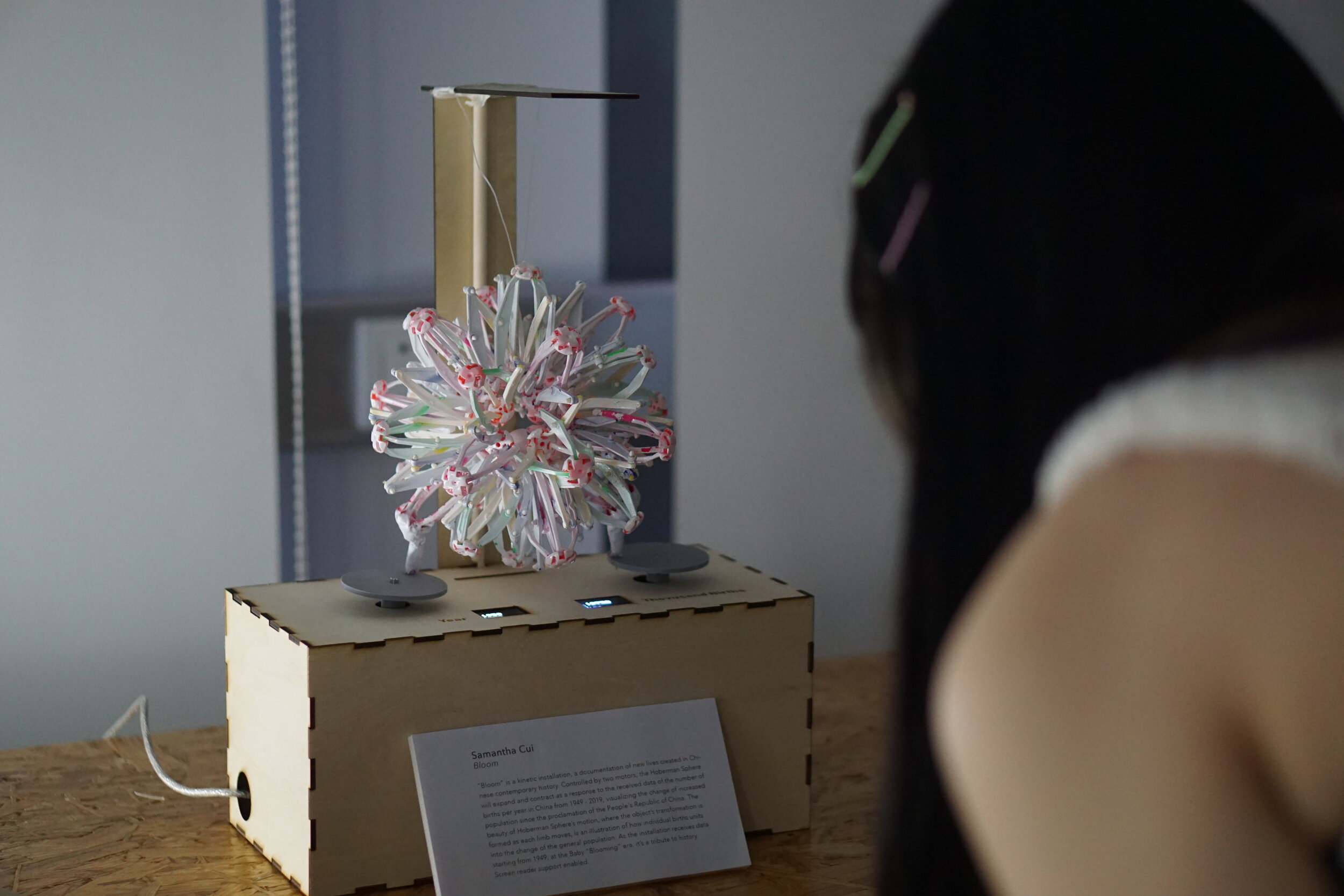
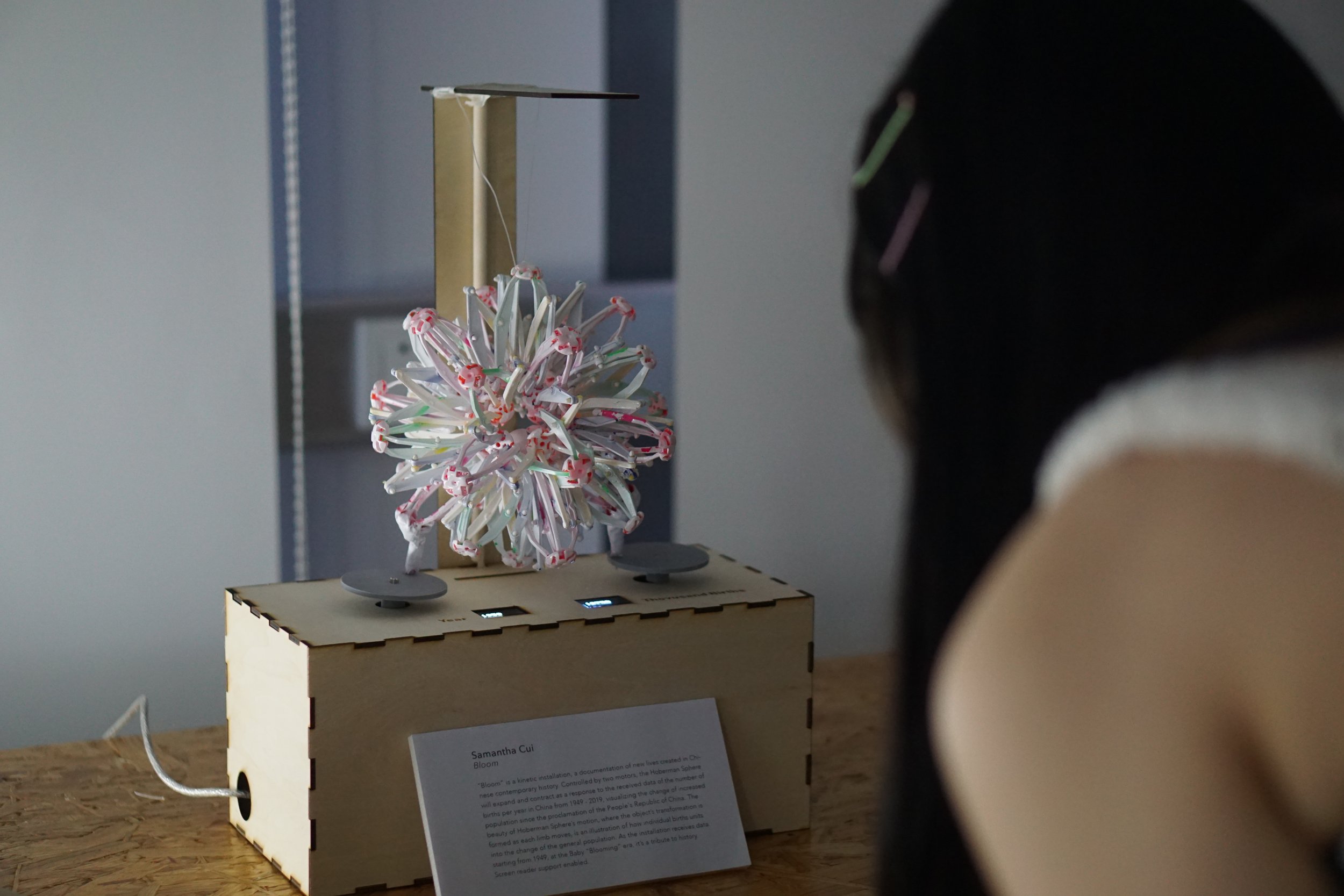
Bloom is a kinetic installation, a documentation of new lives created in Chinese contemporary history. Controlled by two motors, the Hoberman Sphere will expand and contract as a response to the received data on the number of births per year in China from 1949 to 2019, visualizing the change of increased population since the proclamation of the People's Republic of China.
The beauty of the Hoberman Sphere’s motion, where the object’s transformation is formed as each limb moves, is an illustration of how individual births units into the change of the general population. As the installation receives data starting from 1949, the Baby “Blooming” era, it’s a tribute to history.
It makes the invisible visible by amplifying data through art.




01. Background
In May 2021, the Chinese Government released the "Three Child Policy". According to data from the last three National Censuses, the number of newborns has been showing a decreasing trend. In Chinese contemporary history, there have been multiple policies created to influence the population by controlling newborn numbers. These policies have indirectly forced women and families into making cruel decisions of having an abortion to avoid having too many children.


02. Ideation & Prototyping
Hoberman Sphere has been in many childhood memories. As the sphere slowly changes shape, the motion creates the effect of a breathing organism. By using newborn data each year in Chinese contemporary history to control this particular object, this project will obscurely confront the problematic situation.
The movement of the Hoberman Sphere has been something that fascinates me since childhood. It's an expanding and contracting kinetic structure assembled with hundreds of plastic sticks and connectors. With the right calculation, it could form its movement automatically without the touch of a human hand.
I've experimented with various methods trying to control the sphere using Arduino stepper motors. In the end, I chose the way of using an actuator mechanism (on the bottom right) where it adds an outside force to constrain motion along the radial direction using 3d printed wheels.
Bits and Pieces, 2016. Nils Völker
Inspiration
Once I decided on the concept of using the Hoberman Sphere, I went online to look for inspiration on how this particular object has been previously used to create artwork.
I was very much inspired by a kinetic installation titled Bits and Pieces, by artist Nils Volker (image on the right). He used a combination of strings and motors to control the radius of the spheres. I then started experimenting with increasing/shrinking the sphere using the same mechanism.
Early Experiment
One of the early experiments tried to increase/shrink the sphere through a stepper motor using strings to connect the motor and the sphere. When the motor is turning, it will lose/tighten the string which will also control the radius of the sphere. It will also require building a stand for this installation to work. I drew a graph to demonstrate what this idea would look like (image on the bottom left).
I have experimented with this method of controlling the sphere. It did work when increasing the sphere (image on the bottom right). However, even with a rubber band, the sphere could not shrink. So I had to search for a better idea to control the sphere.
Discover
While looking for new solutions to control the Hoberman Sphere to increase/shrink. I gradually redefined and narrowed down the problem I was trying to solve.
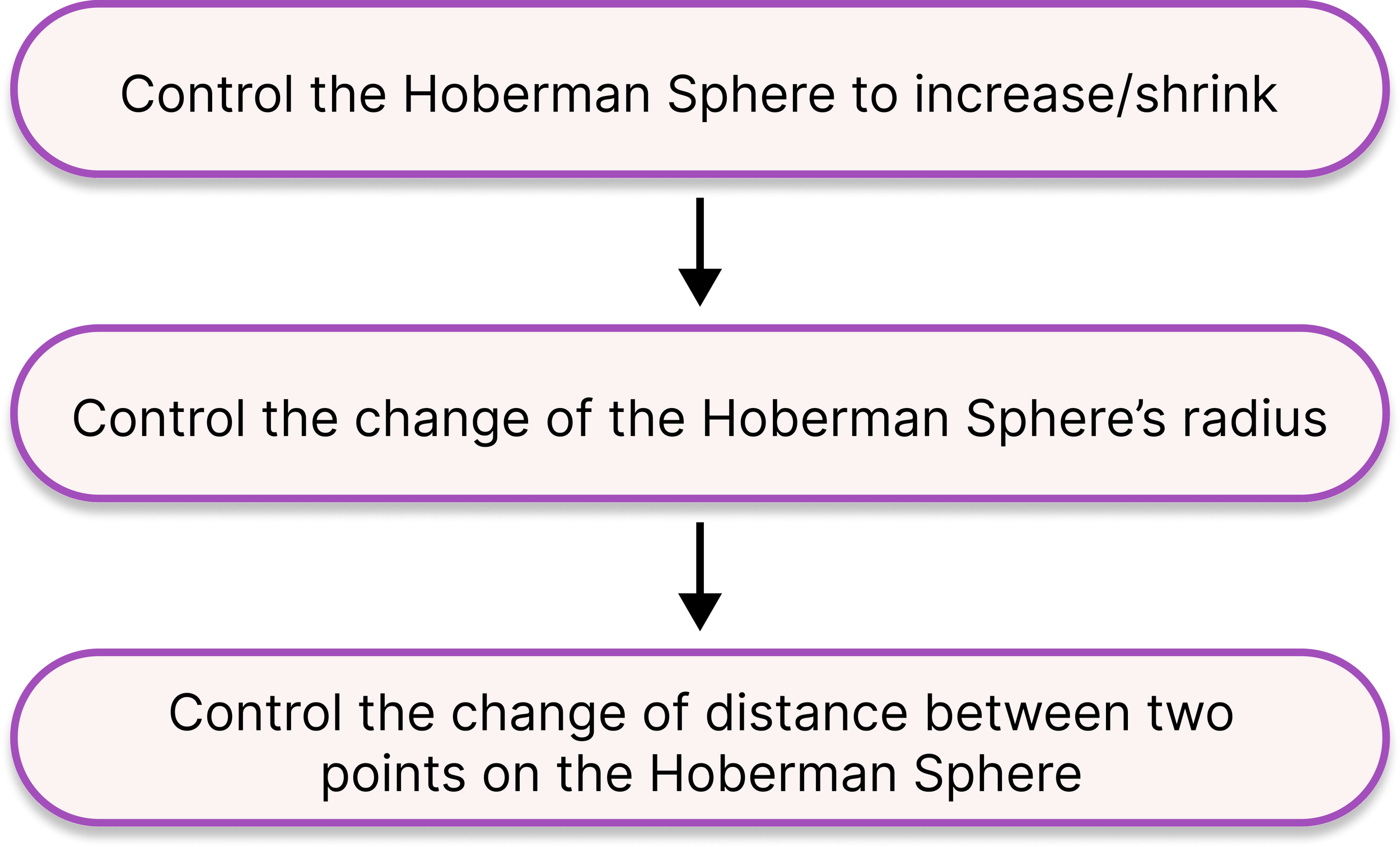
Once I’ve narrowed down the design challenge to controlling the distance between points using a stepper motor, I had an idea. One of the exercises we did when learning Arduino was using two stepper motors to create a drawing machine (image on the left). By attaching the same two 3D-printed caps to the motor, we could then control the distance between the two points on the cap by simply rotating the motor.
Two stepper motor motions cause different distances between two fixed points
Final Solution
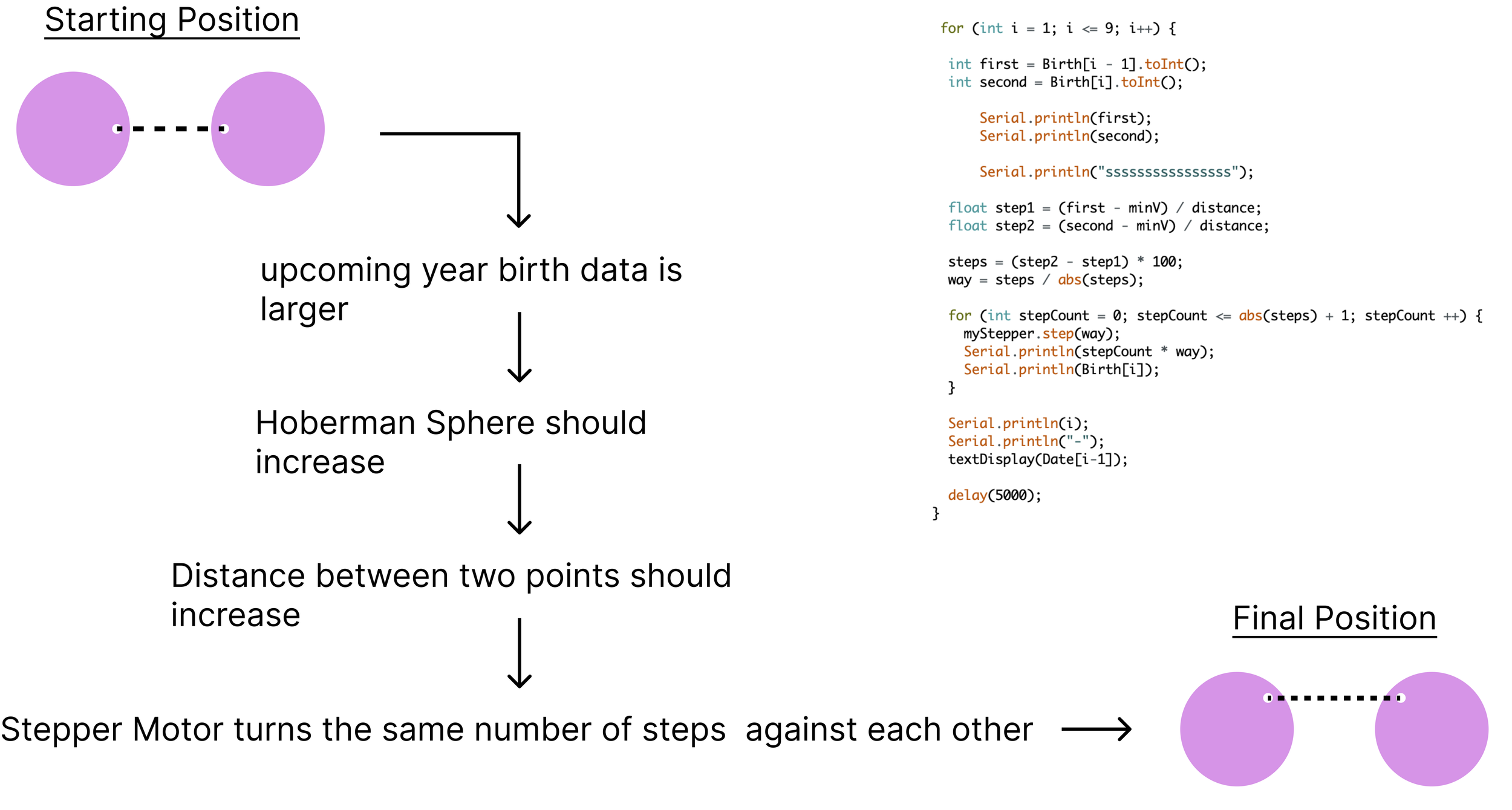
With the new idea in mind, I did a quick experiment by attaching two sticks to two points of the Hoberman Sphere and manually rotating the sticks clockwise with a delay between them. It worked! The sticks were controlling the distance between the two points, therefore, controlling the Hoberman Sphere to increase/shrink. I then created a sketch of the final installation.
03. Production
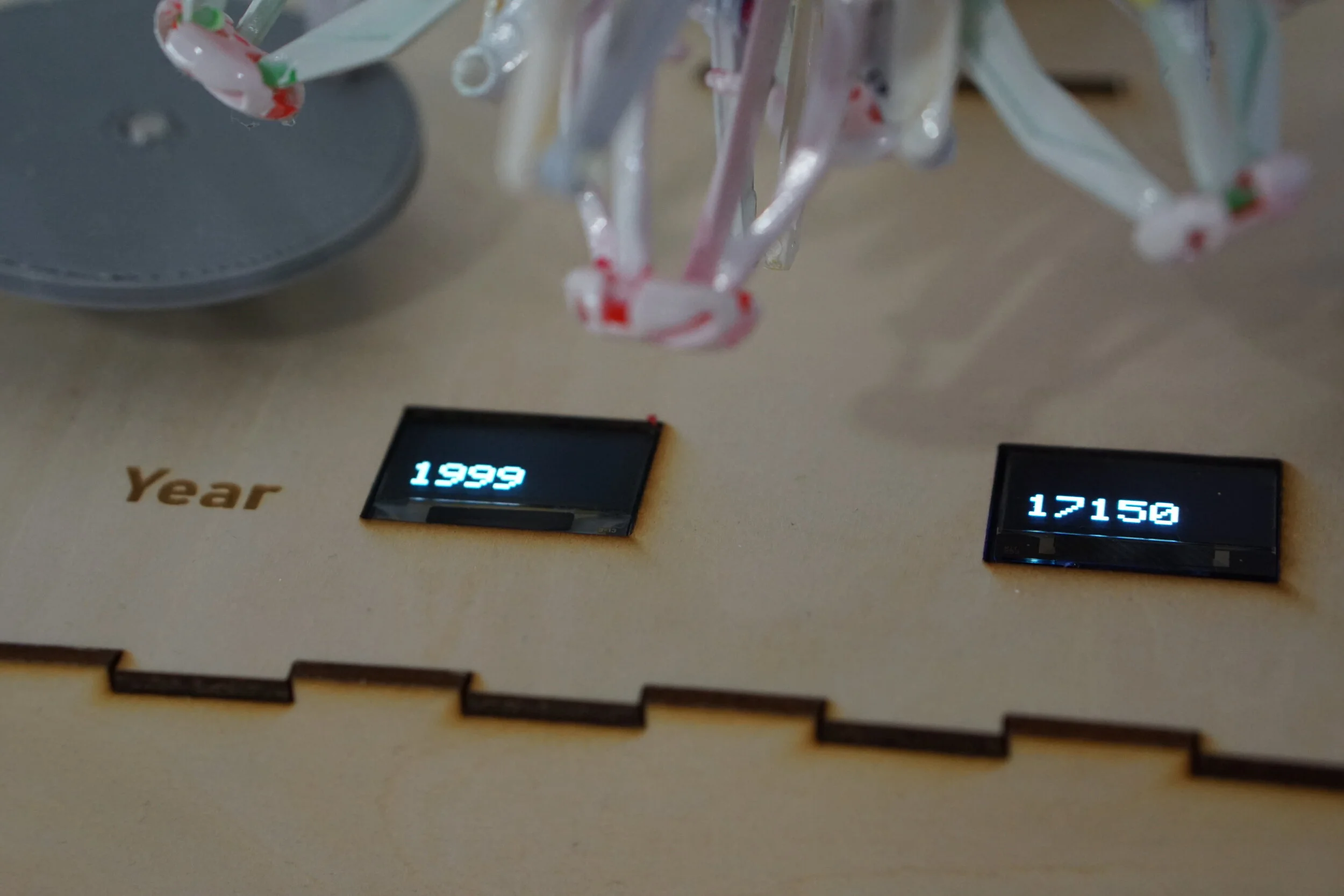
After prototyping, the production was off to a good start. I first finished the Arduino part of the project. Where I’m mapping the data to how big the Hoberman Sphere should be to which positions the two stepper motors should turn to, as well as using two OLED Displays to show the data on the screen.
Arduino Development
After several attempts, I find the easiest way to achieve what I’m aiming for is to use two Arduino each controlling one Stepper Motor and one OLED Display.
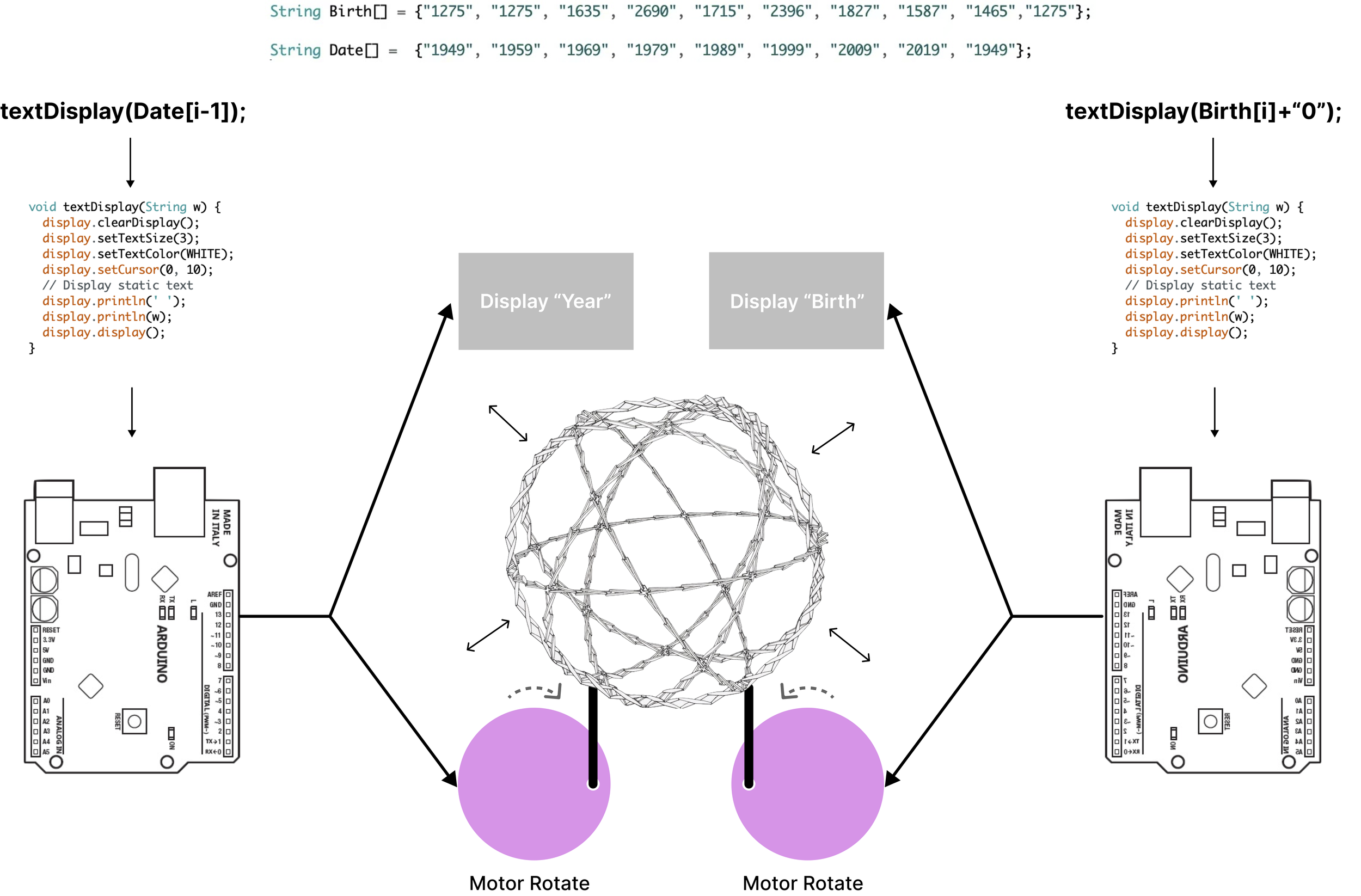
For the rotation of the motor, I mapped the number of steps the motor would turn to the birth number of the specific year being displayed on the OLED screen.
Year: 1949 Birth: 1275
Year: 1959 Birth: 1635
Year: 1969 Birth: 2690
Digital Fabrication
I used a 3D printing and laser cutting machine to complete other parts of the installation, including the two caps attached to the stepper motor and the base box with a beam.
Laser Cutting Box Design
Laser Cutting In Progress
Stepper Motor Connector 3D Design
Installation Setup Test
04. Reference
China Newborn Data from 1949 - 2019 (Chinese)
05. Exhibition
NYUSH IMA Fall Show, Shanghai, China
back to Interactive Media